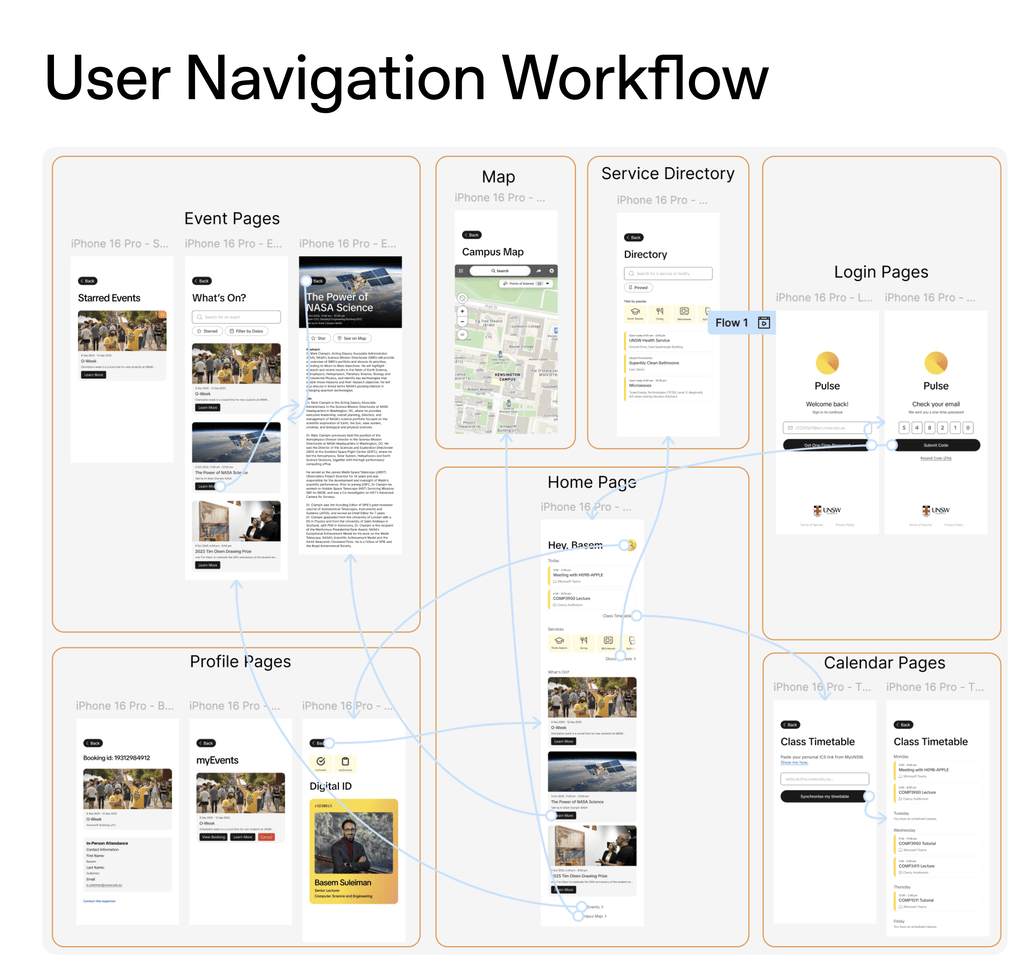
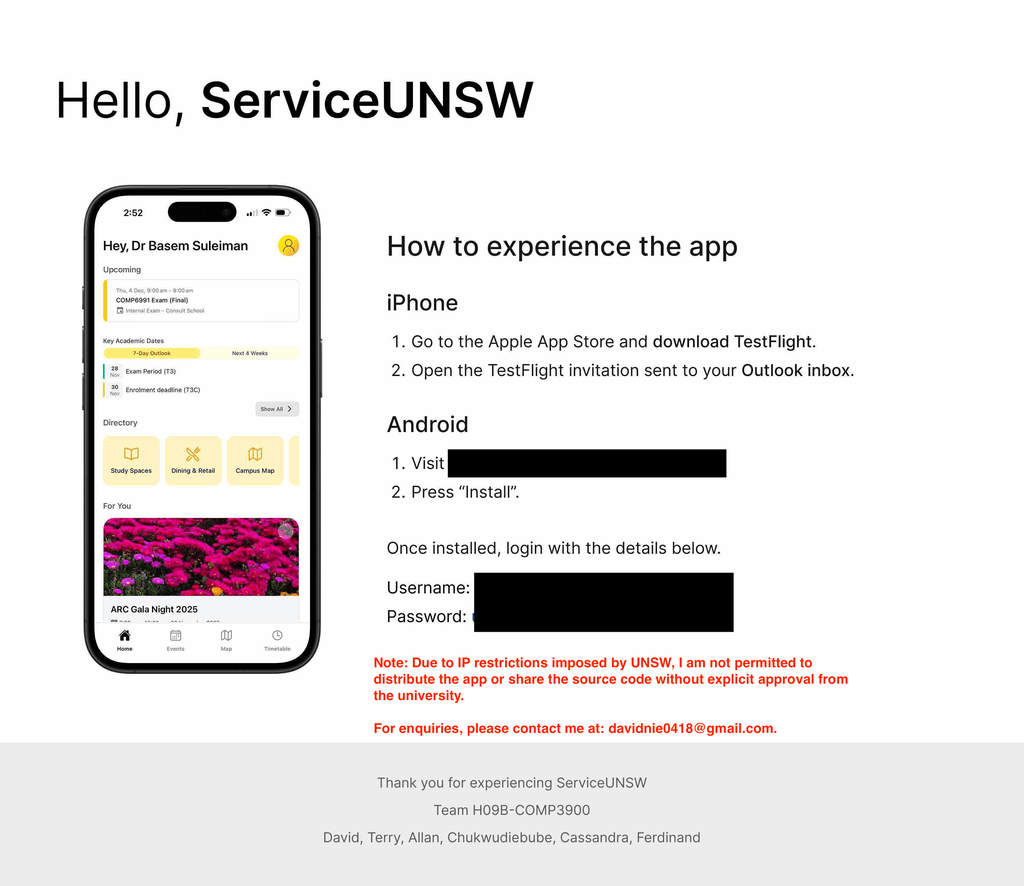
ServiceUNSW: Centralized University Services App
Project Duration: 8 weeks
Tech Stack:
- Auth:
BetterAuth - Frontend:
Expo(React Native) - Backend:
Next.js+tRPC, hosted on Vercel - DB:
PostgreSQLusingDrizzle ORM, hosted on Neon (serverless PostgreSQL) - CI/CD:
Github Actions - Testing:
Jest Framework - Dev tools:
Jira
The app is shipped to both IOS via TestFlight and Android.
My role in the team: DevOps Engineer + Scrum Master
Credits:
- Product Owner: Ebenzer Ajaero
- Frontend Engineers: Allan Zhang, Ebenzer Ajaero
- Fullstack Engineers: Ferdinand Woo, Terry Zhong
- Backend Engineer: Cassandra Tran
Project Outcome:
- The project was nominated to become one of the Vertically Integrated Projects (VIP) for the following year. Click here
- Multiple leaders from different UNSW faculties, including the Deputy Head of the Engineering faculty, were present for the final client demonstration.
The project proposal can be downloaded here
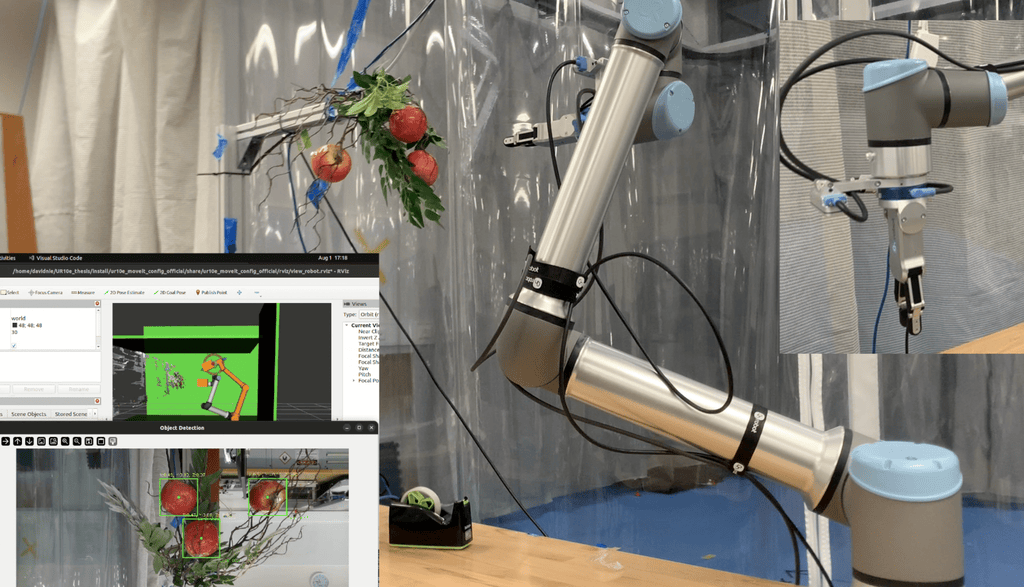
Graduate Thesis
Research Topic: Optimising Comprehensive Plant Data Collection Using a Mobile Manipulator for Holistic Agricultural Insights
Project Duration: 1 year
Keywords: ROS2 Framework, C++, python, Modbus, YOLO, Advanced Robotics Command Language (ARCL), Vision-based gripping, MoveIt!, Path Planning
Supervisor: Dr. Leo Wu
Github Repo:
The Thesis Report can be downloaded here

Screwdriving Bot 1
Project Duration: 6 weeks
Language Used: ROS2 Framework, c++, python
Library/Tool Used: MoveIt for ROS2 (Motion Planning Library), URDF (Robot Modelling), TF2 (ROS2 Transformation Library), Basic Computer Vision
3D Printing, end-effector design and Arduino integration (Completed single-handedly by Nick)
Co-author:
- Nicholas (James) Bell: Nick’s LinkedIn Profile
- Jiawen Zhang: Jiawen’s LinkedIn profile
Supervisor:
- Daryl Lee: Daryl’s LinkedIn profile
Open-sourced github repo: click_here
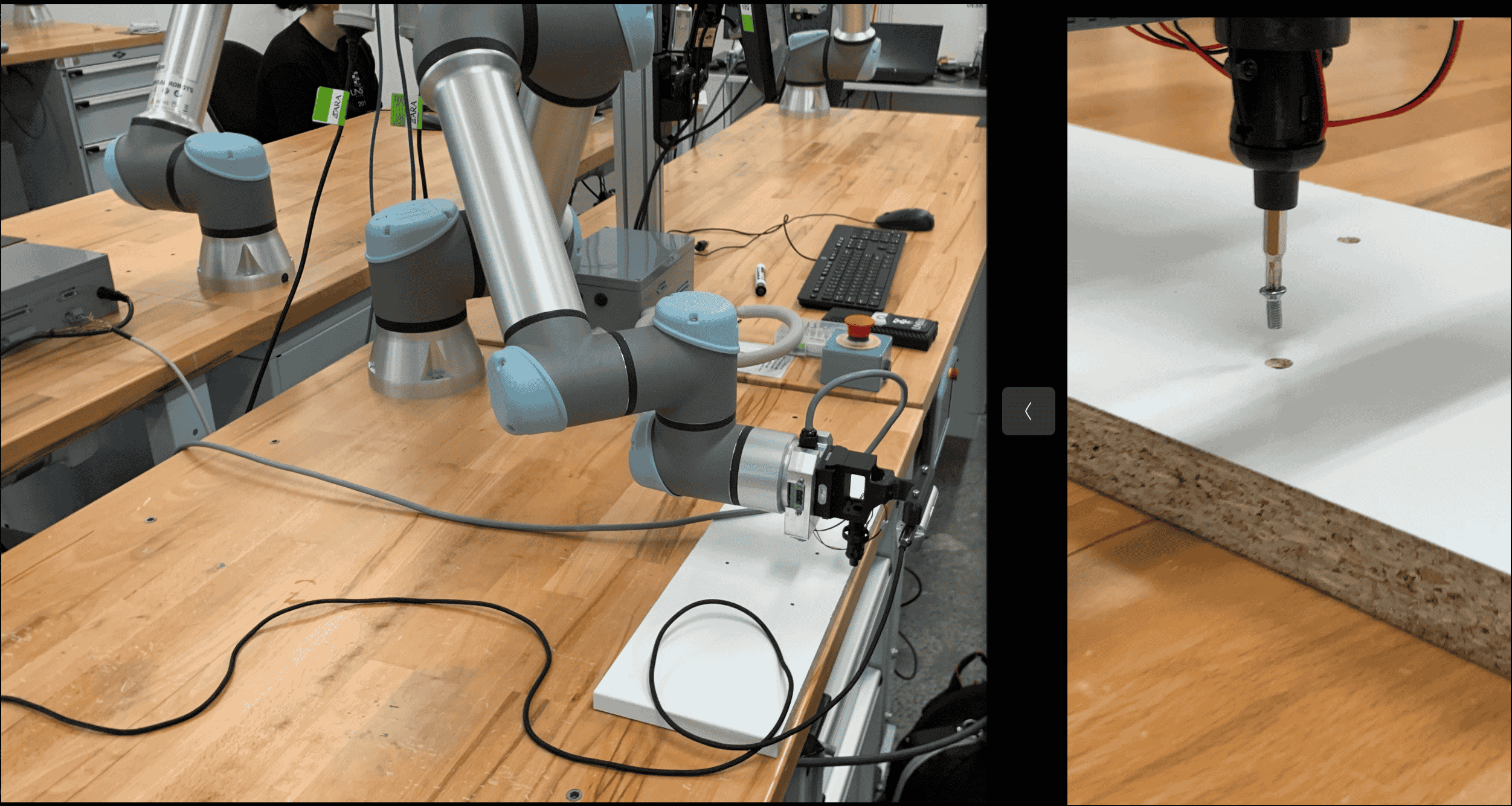
 The project utilizes UR5e from Universal Robots for automated screw driving.
The project utilizes UR5e from Universal Robots for automated screw driving.
The novelty of this system lies in the integration of a depth camera mounted on the end effector, enabling the robot to adapt to different screw-hole locations without manual tuning.
We won the 2024 UNSW MTRN4231 Course Competition
SIEMENS Process Simulate Plugins
Project Duration: 8 weeks
Language used: C#
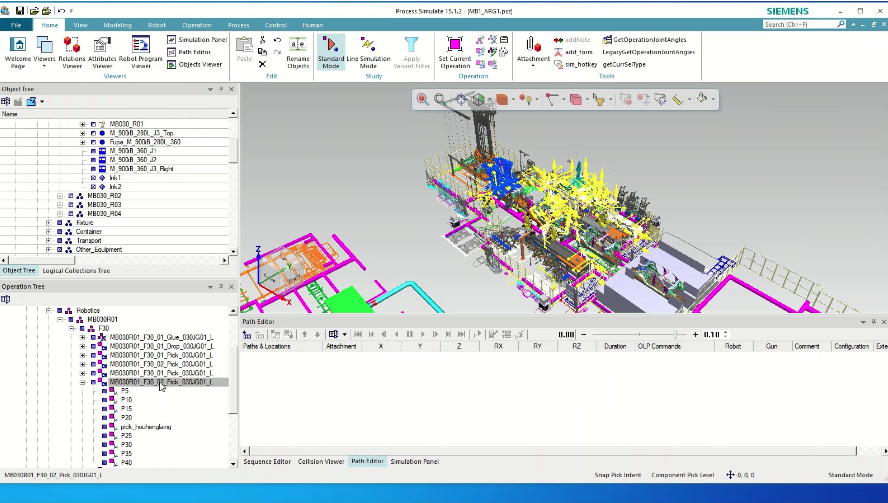
Background: Process Simulate from SIEMENS is a software used by simulation engineers at FFT Shanghai to improve, verify and validate the correctness and plausibility of the welding production system design.
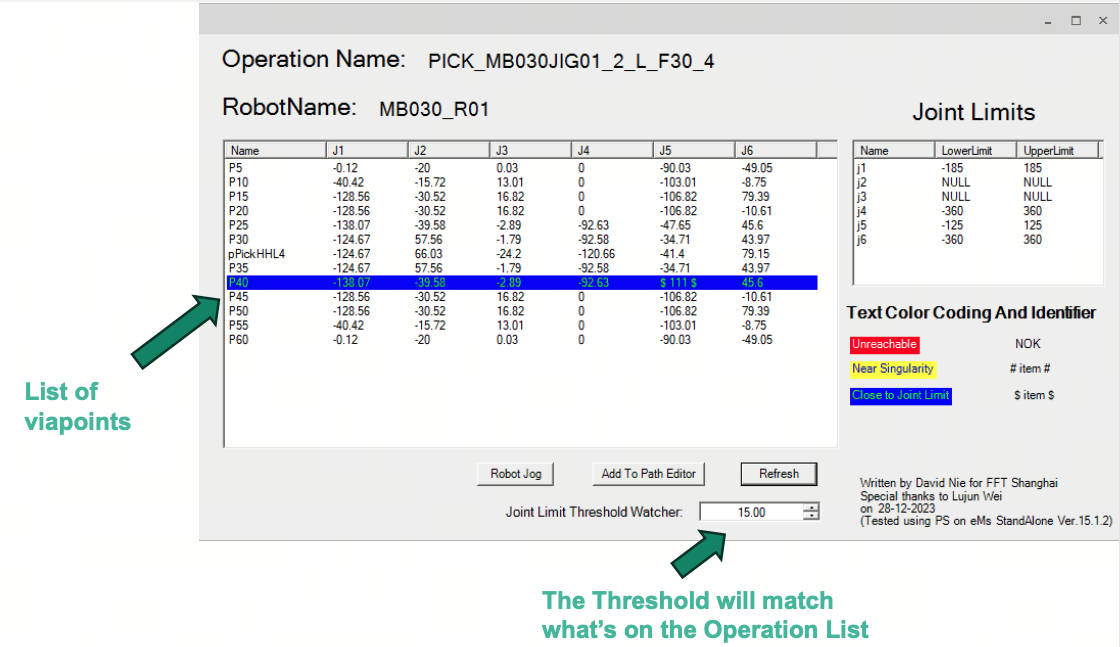
What does the plugin do: To improve efficiency by reduce repetitive work, I was assigned to design a plugin that generates a table showcasing the joint angles of the robot at each via-point. The plugin also highlights the via-points that are near joint limit or potential singularities.
Impact & Result:
- The plugin passed the internal screening and entered Alpha testing phase by the time I completed the internship.
- The plugins were described by the simulation team lead as “handy tools that will be used every day and save more than 3 hours on each project”.
The Plugin Manual can be downloaded here